Für eine anstehende mehrtägige Radtour habe ich mir viele Gedanken um meine Stromversorgung gemacht. Da ich mit Smartphone-App auch Navigiere, habe ich dadurch einen relativ hohen Verbrauch. Vor allem innerorts lasse ich gerne das Display auf voller Helligkeit an, damit ich das Abbiegen nicht verpasse. Ich habe mich bei allen Möglichkeiten (Solar, Powerbank, Ladestecker, …) für einen Dynamo entschieden, mit dem ich auch USB laden kann. Rein optisch sollte es ein Felgenläufer-Dynamo werden und die Elektrik wollte ich selbst bauen. Neue Felgenläufer waren mir viel zu teuer und zu dem Zeitpunkt gab es auch keine passenden Gebrauchten. Also habe ich den Entschluss gefasst, den Dynamo auch selbst zu bauen. Ein paar mittelmäßig erfolgreiche Prototypen mit vorhandenen DC-Motoren später haben mich schlussendlich dazu einlenken lassen, einen passenden Motor kaufen zu müssen. Aber dann bitte mit fetter Stromausbeute und maximal leichtläufig. Das schreit beides nach BLDC, also habe ich mich darauf eingeschossen und einen Plan gemacht.

Der passende Motor
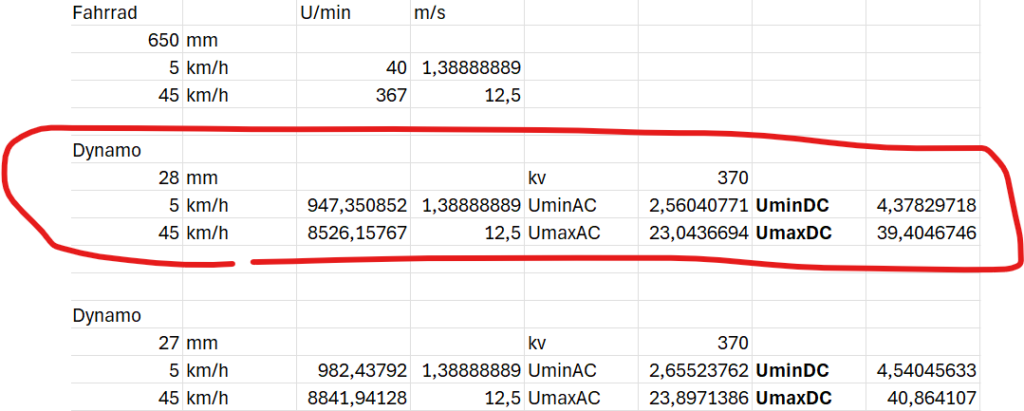
Kleine BLDC Motoren sind für RC-Flieger, -Autos sowie Quadcopter und dergleichen wie Sand am Meer und in jeder Konfiguration zu finden. Die wichtigste Kenngröße ist dabei der kV-Wert. Wie der Wert sich zusammensetzt ist hier gut geschrieben: https://www.rc-modellbau-portal.de/index.php?threads/brushless-motor-kv-drehzahl-drehmoment.123/ Die BLDC Motoren sind i. d. R. 3-Phasig, also ist die gleichgerichtete Spannung etwas anders zu berechnen. Damit die ausgegebene Spannung des Dynamos innerhalb der Grenzen bleiben, die später meine Elektronik abkann, musste ich erstmal etwas rechnen und passende Teile suchen. Ich habe USB-Lade-PCBs gefunden, die 6 – 40V Eingangsspannung abkönnen. Mehr darf der Dynamo also nicht abgeben. Gleichzeitig möchte ich wissen, was meine niedrigste Geschwindigkeit ist, die ich fahren kann. Für ein paar Fälle habe ich Berechnungen aufgestellt und mich für den Motor mit 370 kV und einem Laufrollen-Durchmesser von 28mm entschieden. Ich muss theoretisch mind. 6,6km/h fahren, damit der USB Lader angeht und kann bis zu 45 km/h schnell fahren, ohne dass es mir die PCB zerreißt. Mehr wird realistisch gesehen auch bergab und voll beladen nicht drin sein.
Der Motor, für den ich mich entschieden habe: Link
Der passende Laderegler: Link
Elektronik und Gehäuse
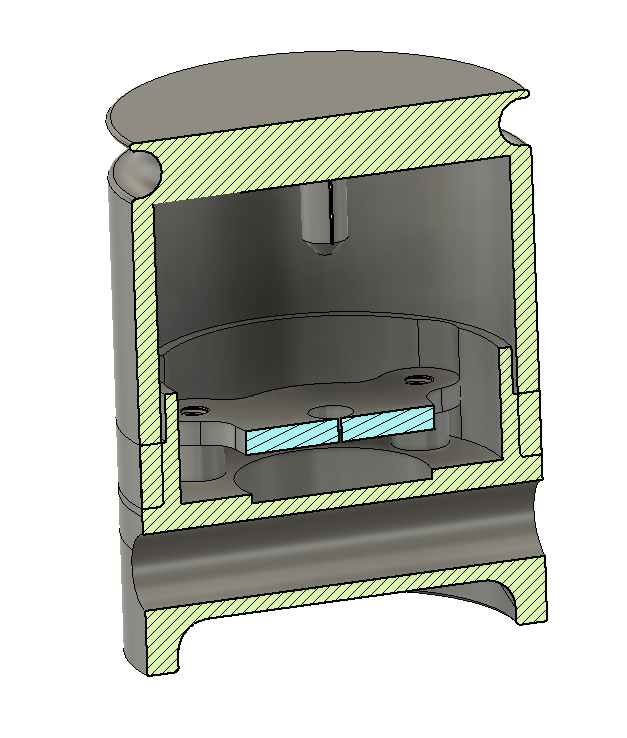
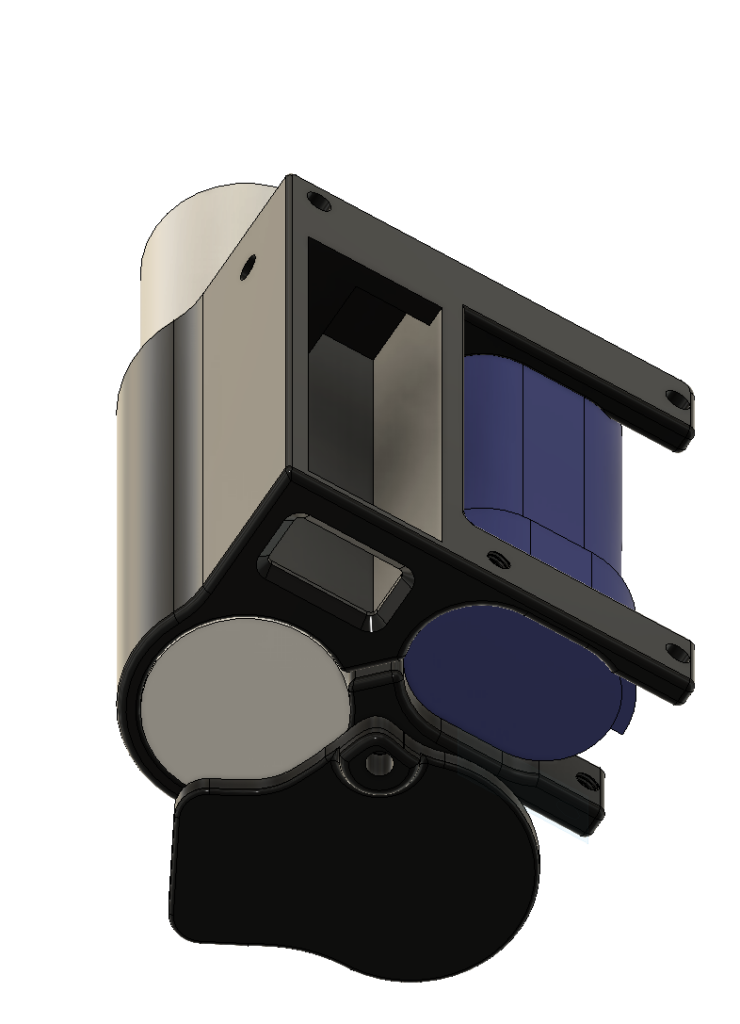
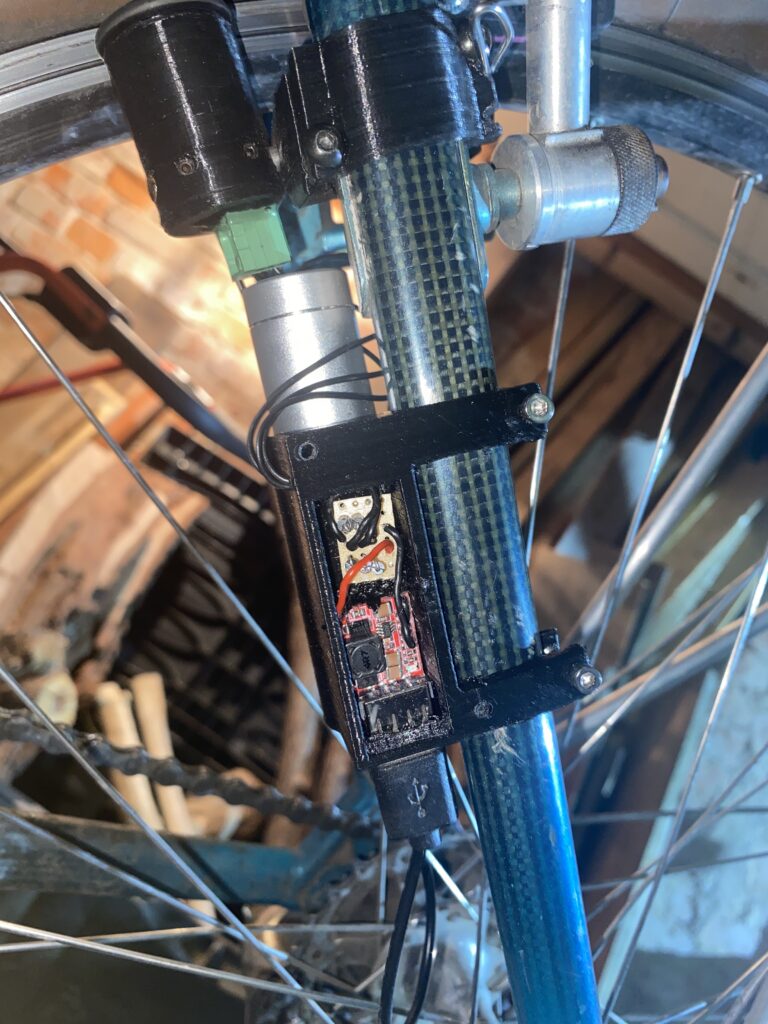
Die Gehäuse für Dynamo und Elektronik habe ich vollständig aus PETG gedruckt – super leicht und ausreichend belastbar, da die Kraft im Dynamo von der ganz gut gelagerten Motorwelle aufgenommen wird. Dynamo und PCB-Gehäuse sollten aus 2 Teilen bestehen, um so wenig bewegliche Teile wie möglich zu haben. Um den Strom vom Dynamo zum PCB-Gehäuse zu geben, habe ich 3 Polige Kf141r verwendet. Die sind im Dynamo mit den 3 Phasen des Motors verlötet und mit Epoxy im abnehmbaren Boden vom Dynamogehäuse eingeklebt.
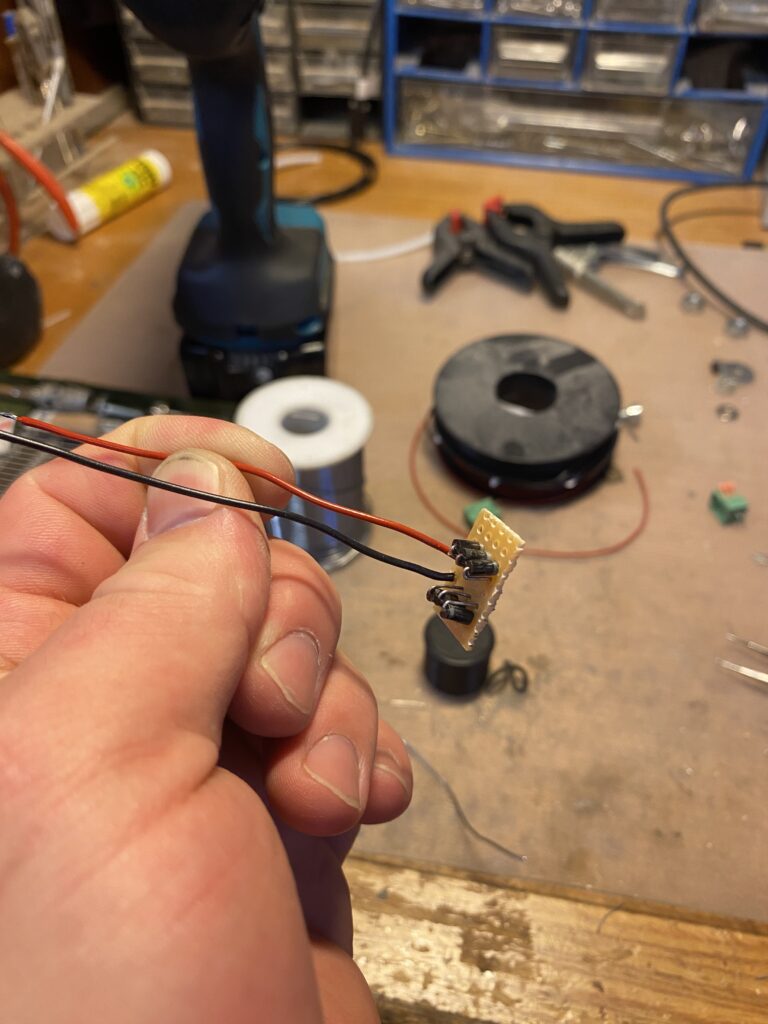
Damit die 3-Phasen gleichgerichtet werden, braucht es einen Gleichrichter. Die PCB ist schnell auf Streifenraster mit 6 Dioden und 5 Kabeln zusammengelötet. Ohne weitere Glättung habe ich das auf den USB-Laderegler gegeben. Warum auch weiter glätten, wenn es gleich im nächsten Bauteil durch ein Step-Down Wandler geht.
Neben dem oben aufgeführten USB Regler habe ich auch kleinere bestellt und getestet. Da der Ausgabestrom sehr stark schwankt, verwende ich anschließend eine sehr günstige DIY-Powerbank als Puffer. Die besteht aus einer 18650 Zelle und einem Alu-Gehäuse mit integriertem Laderegler für 2€: Link
Den Abklappmechanismus des Dynamo habe ich mir von Velogical abgeschaut. Ziemlich genial, den Abklapp-Hebel gleichzeitig zur Vorspannung für den Dynamo zu verwenden. Da die Federspannung beider meiner Bremsen über eine am Canti-Sockel festgeschraubte drehbare Kappe eingestellt wird, wollte ich dort nichts weiteres anschrauben und den Dynamo anders befestigen. Der Dynamo ist nun auf einer 5mm Stahlwelle fest verschaubt. Diese Welle ist schwenkbar in einer fest an der Sitzstrebe verschraubten Klemme. Auf der Rückseite der Welle ist ein 1,5mm Edelstahldraht eingeschraubt, der so verformt ist, dass er in 2 Nuten einrasten kann. In einer der Nuten wird der Dynamo an die Felge gedrückt. Das Ergebnis stellt mich sehr zufrieden.
Als meine Baupläne schon fertig waren, habe ich entdeckt, dass genau so etwas in richtig chic, aber für einen stolzen Preis zu kaufen gibt: https://www.velogical-engineering.com/velo-bordnetz/technische-informationen/#1589897405150-367a47b6-c6b69983-5637
To DO
Ich habe ein günstiges USB-Messgerät bestellt, mit dem ich die Stromausbeute bei verschiedenen Geschwindigkeiten messen möchte. Die Geschwindigkeit wird per GPS ermittelt und die USB-Spannung und -Strom muss ich dann während der Fahrt ablesen.